Congratulations! VIPL’s paper on multi-object navigation, “Goal-oriented Dynamic Weight Optimization for Multi-Object Navigation” (authors: Haitao Zeng, Xinhang Song, Shuqiang Jiang), was accepted by IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI). T-PAMI is a tier-1 journal in the fields of pattern recognition, computer vision, and machine learning, with an impact factor of 18.6 in 2025.
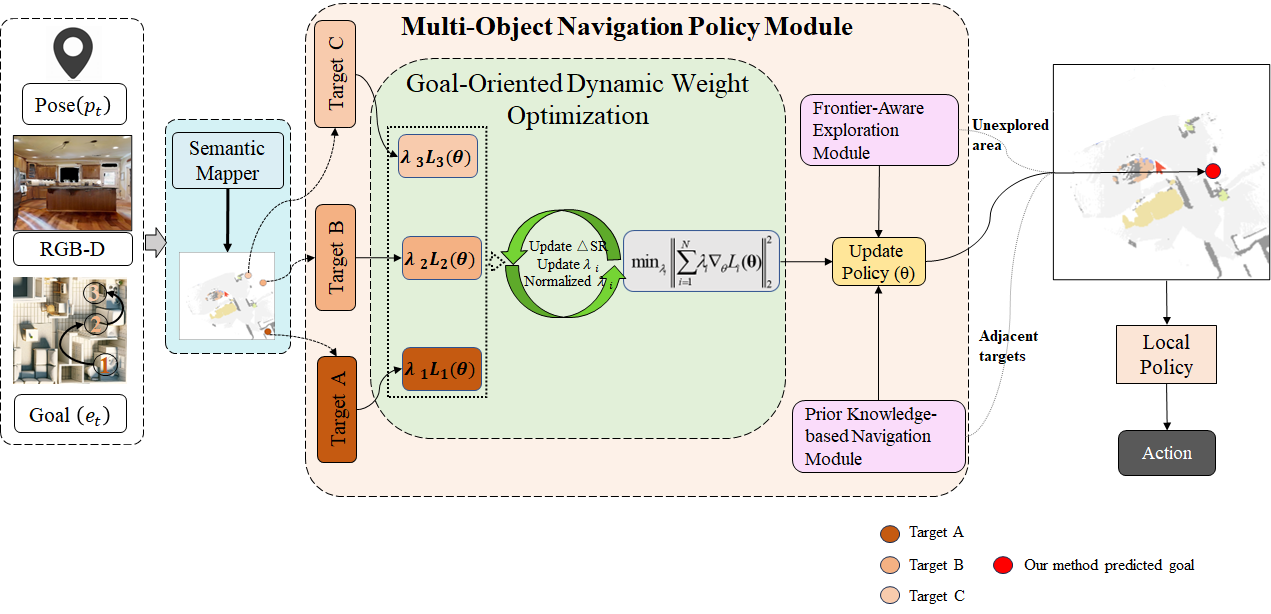
Multi-object navigation requires an agent to sequentially search for and reach multiple targets within a single episode, where strong temporal coupling and spatial correlations exist among the targets. Most recent methods focus on local path optimization for individual sub-tasks, making it difficult to account for global planning and often resulting in redundant trajectories. To address these challenges, we propose Goal-oriented Dynamic Weight Optimization (GDWO), which formulates multi-object navigation as a goal-oriented closed-loop optimization process. By projecting the policy losses of different targets into a unified decision space, GDWO dynamically adjusts the optimization weights of each target using gradient information, and further normalizes them with navigation success rates, enabling the training process to adaptively focus on more challenging targets. In addition, the proposed method incorporates a prior knowledge–based navigation module and a frontier-aware exploration module to further improve exploration efficiency and path planning quality. Experimental results on the Gibson and Matterport3D datasets demonstrate that GDWO significantly outperforms existing methods in terms of success rate and path efficiency, while exhibiting strong stability and generalization capability.
Download: