近日,实验室关于行人再识别的工作被IEEE TIP接收。TIP的全称为Transactions on Image Processing,是计算机视觉和图像处理领域的国际期刊之一,2020年SCI影响因子为6.79。论文信息:
Furong Xu, Bingpeng Ma, Hong Chang, and Shiguang Shan.“Isosceles Constraints for Person Re-identification”, IEEE Transactions on Image Processing (TIP), 2020. (Accepted)
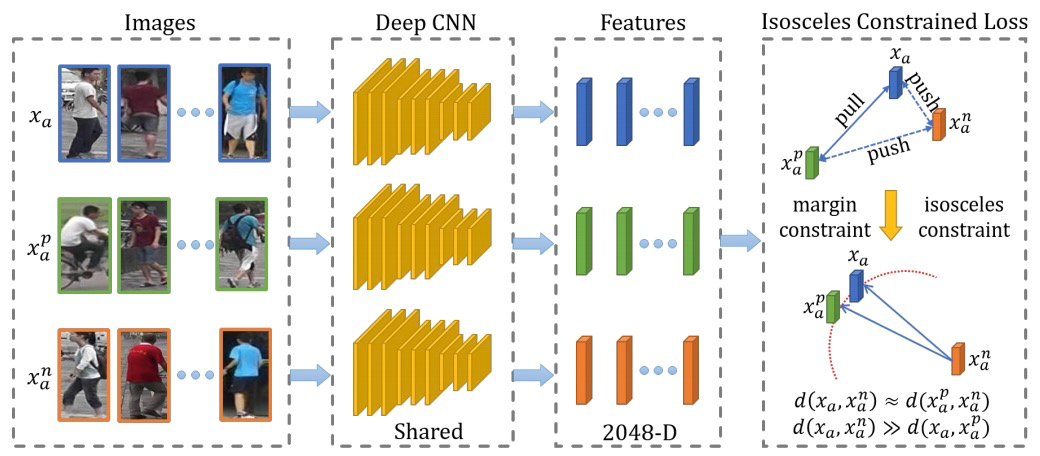
行人再识别是一个具有挑战性的检索任务。同一行人由于拍摄位置、时间等不同具有较大差异,而不同的行人由于拍摄视角,姿态等相同具有较大相似性。批次难例挖掘三元组损失在该任务上取得了一定的成功。然而,批次难例挖掘三元组损失只关注了同一批次内的三元组,没有考虑全局范围内的三元组,导致批次内的三元组在满足匹配样本对和不匹配样本对的间隔约束时,并不能保证全局范围内的三元组也满足间隔约束。为了进一步约束全局范围内的样本对距离,一些方法增加了对匹配对样本或者不匹配对样本的固定值距离约束。然而,对所有匹配/不匹配样本对采用同一个固定值约束,太过严格,容易导致优化后的特征空间扭曲。为了达到自适应优化全局范围内样本对距离的目的,本文提出了等腰约束。等腰约束的思想在于,当两个样本足够近时,他们到任意其他样本的距离应该尽可能相等。反之,若存在多个样本到某两个样本的距离相等,则这两个样本应该大概率非常接近。本文通过约束三元组中的不匹配样本到两个匹配样本的距离相等,来无限拉近匹配对的距离,结合三元组本身的间隔约束,从而使全局范围内的匹配对和不匹配对的距离差异被进一步增大。同理,等腰约束也可以被直接用于四元组损失。其中,等腰约束用于三元组损失的总体框架图如下:
总体而言,本工作的主要贡献包括:1)提出了等腰约束作用于三元组损失和四元组损失,进一步拉大全局范围内匹配样本对和不匹配样本对的距离差异;2)在多个行人再识别数据集上验证了等腰约束的有效性;3)验证了等腰约束在不同基础网络,不同检索任务(包括车辆再识别,通用细粒度识别)上的有效性。
附件下载: